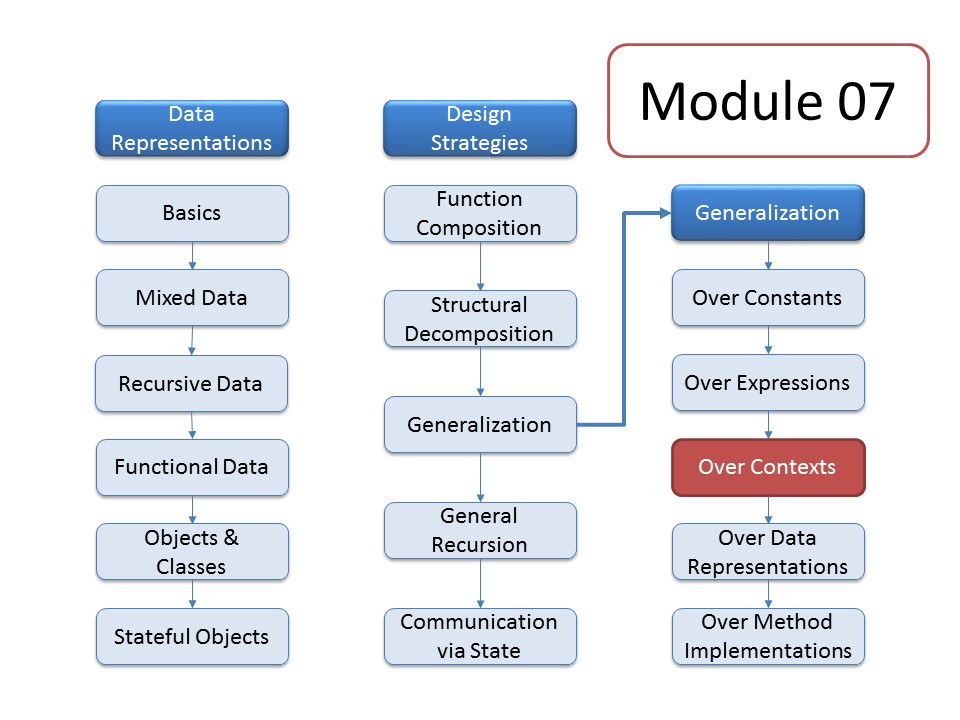
Some problems are not easily solved using structural decomposition as we've defined it. Others are solved only inefficiently by pure structural decomposition. We introduce two new kinds of generalization to help solve such problems. We introduce invariants as a way of recording the assumptions that a function makes about its environment.
Part VI from the textbook. We are doing things in a different order than the textbook does. Also, we are doing this topic rather differently than the textbook does, so use the textbook for background rather than as a normative reference.
Last modified: Sun Oct 19 11:27:34 Eastern Daylight Time 2014