- three degrees of freedom, which can be defined as
- two perpendicular translation components
 that give the location of an identified point on the robot relative to an identified point in the environment
that give the location of an identified point on the robot relative to an identified point in the environment - the relative angle
 between an identified vector on the robot and an identified vector in the environment
between an identified vector on the robot and an identified vector in the environment
- two perpendicular translation components
- together, we can call the position and orientation of the robot its pose
and origin
 is a point in world frame
is a point in world frame and
and  are unit vectors in world frame
are unit vectors in world frame- 6 total numbers, but we only wanted 3
- actually not any choice of 6 numbers for
 is allowed, because and must be perpendicular unit vectors
is allowed, because and must be perpendicular unit vectors



- these three constraints reduce the space of possible numeric assignments to from 6 to 3 dimensions
- we can choose any
 and then set
and then set  to denote the robot’s position
to denote the robot’s position - we can then choose any
 and set
and set  to denote the robot’s
to denote the robot’s 
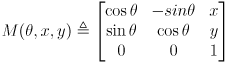
- this makes the CCW angle from
 to (measured in radians)
to (measured in radians) - is also determined by :
 (remember your trig identities?)
(remember your trig identities?)
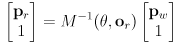
is the same vector but with coordinates measured in world frame (note in this case
- since
 is orthogonal, it is trivial to invert: the inverse of any orthogonal matrix is its transpose:
is orthogonal, it is trivial to invert: the inverse of any orthogonal matrix is its transpose:

- we can then derive



- and




- putting the latter into homogenous form,
 with
with 
