Computer Graphics (CS 4300) 2010S: Lecture 8
Today
- HW1 graded and will return by email today
- HW2 due weds!
- finish from last time:
- Model-View-Controller (MVC) architecture
- common user interaction techniques
- rectangles in 2D
- polygons in 2D
- tessellation by ear-clipping
Rectangles in 2D
- axis-aligned rectangles are very common in 2D graphics, especially GUIs
- typically represented as a point
 giving the *upper left corner (i.e. the corner with minimum
giving the *upper left corner (i.e. the corner with minimum  and
and  coordinates) plus (non-negative) width
coordinates) plus (non-negative) width  and height
and height  (horizontal and vertical extents, respectively)
(horizontal and vertical extents, respectively)
- often
 are all integers (pixel coords) but some APIs allow floating point rects as well
are all integers (pixel coords) but some APIs allow floating point rects as well - easy to check if a given point
 is in a rect:
is in a rect:  and
and 
- two axis-aligned rects
 and
and  overlap iff
overlap iff - also easy to rasterize, e.g.
- for
 to
to 
- non-aligned rectangles are less common
- can treat as an axis-aligned in a rotated coordinate system (we will cover rotations in detail later this week)
- or, just don’t special-case, and handle like any other convex polygon
Polygons in 2D
- def: a simple polygon in 2D is an ordered sequence of line segments
 ,
,  , such that
, such that- each edge
 is the segment from a start vertex
is the segment from a start vertex  to an end vertex
to an end vertex 
 for
for 

- non-adjacent edges do not intersect
- the only intersection of adjacent edges is at their shared vertex
- note that it is sufficient to store e.g. only the
 start vertices, and this also enforces the connectivity constraints by construction
start vertices, and this also enforces the connectivity constraints by construction - this also illustrates that the number of sides equals the number of vertices
- the polygon degenerates to a segment if
 (it’s also possible to have degenerate polygons for
(it’s also possible to have degenerate polygons for  )
) - nomenclature: sometimes even an open chain of segments is called a polygon
- definition of inside is intuitive for a simple polygon
- how to check if a point is inside a simple polygon?
- a polygon is convex if, for any two points
 and
and  both inside the polygon, all points along the segment from to are also inside the polygon
both inside the polygon, all points along the segment from to are also inside the polygon - have already covered point-in-polygon test for convex simple polygons: e.g. consider the edges in counter-clockwise order (this is conventional) and then check if is on or to the left of every edge
- for non-convex polygons, one solution is to tessellate: break the polygon into a set of convex pieces, and then check each piece separately (will cover this later)
- it is also possible (and classical) to perform insideness checks without tessellating
- two common conventions: “even-odd” rule, and “nonzero” (aka “winding”) rule
- in each case, construct a ray
 in an arbitrary direction from the test point
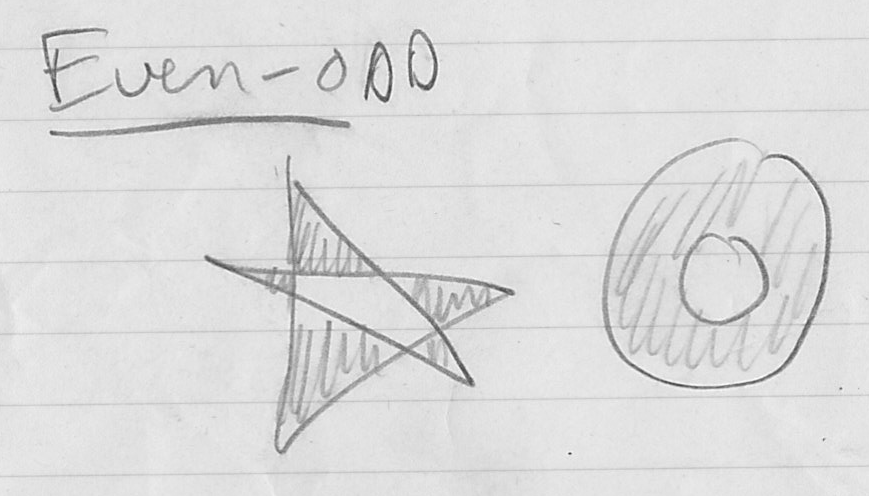
in an arbitrary direction from the test point - even-odd rule
- count number of intersections of with the polygon. is defined to be inside the poly if the intersection count is odd.
- reasoning: each time an edge is crossed, either switch from inside to outside or outside to inside
- but since poly is closed, know that ray must end up outside
- nonzero rule
- again compute all intersections of with the poly edges
 , but this time keep track of whether the edge crossed from left to right (i.e. on left side of and on right side of ) or right to left
, but this time keep track of whether the edge crossed from left to right (i.e. on left side of and on right side of ) or right to left - count +1 for left-to-right and –1 for right-to-left
- is defined to be inside the poly if and only if (iff) final count is nonzero
- reasoning: consider sweeping a point
 along the perimeter of the poly
along the perimeter of the poly - take the integral of the orientation angle of the line segment from to
- turns out that, for one complete sweep of the polygon, the integrated winding angle will be an integer multiple of

- intuition: reasonable definition of inside-ness is to check if the poly “circled around” in CCW direction different number times than in CW direction
- nonzero intersection test turns out to be a shortcut to compute (proof is a little subtle and we will not cover it)
- these two rules can produce different results!
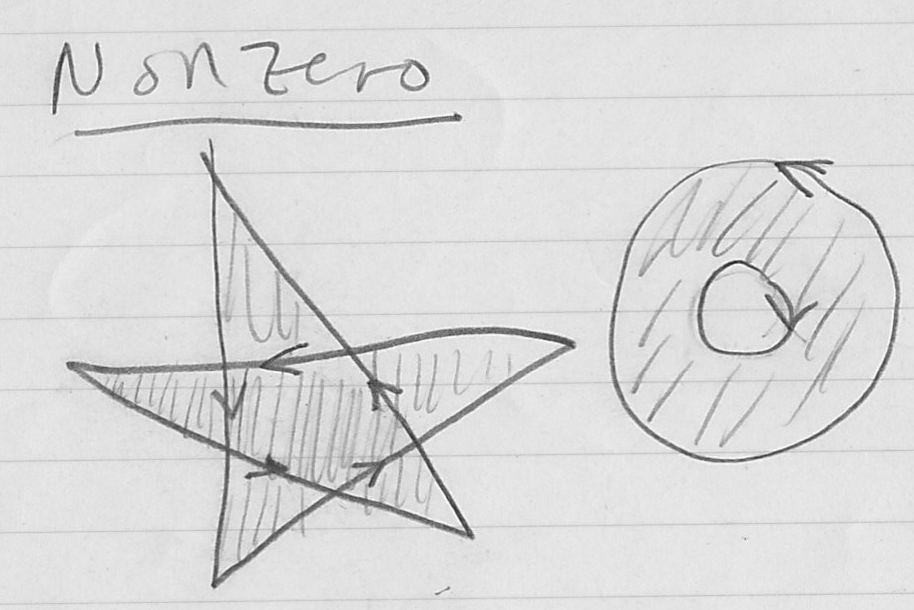
- note that nonzero rule requires external boundary of poly to be in opposite winding order than holes (e.g. CCW for outside, CW for holes)
- no clear “winner”, simply a matter of choice
- some APIs only implement one rule or the other
- Both rules can run into problems if intersects polygon right on a vertex. In that case, just start over with a different . A random choice of (remember, any ray will do) will not touch any vertex “with probability 1” (in continuous coords; “with high probability” in discrete coords, like floating point or integer).
- to rasterize a convex simple polygon, one general approach is
- for
 to
to 
- the details of figuring out the top, bottom, and horizontal extent of the poly at each line can be worked out, even in extensions to non-convex and non-simple polys (using either even-odd or nonzero fill rule)
- we will not cover the details, because in practice, it is becoming less common to rasterize polygons in this way
- instead, most systems are now simply tessellating the polygon into triangles (even if convex) and then rasterizing the triangles
- we will cover tessellation into triangles later today, and rasterizing triangles next time
- what about non-simple polygons?
- the edges may self-intersect
- there may be holes
- there may be degenerate components
- these complicate both point-in-polygon testing and rasterization algorithms
- in practice, self-intersecting polys don’t seem to have many important uses
- but still generally good to be able to handle them, because e.g. a poly may accidentally become self-intersecting due e.g. to numerical imprecision
- or user may simply draw a self-intersecting poly
- holes are sometimes useful: consider drawing a picture of a donut!
- how to even define “inside-ness” for a non-simple polygon?
- even-odd and nonzero rules still can be applied, and in this case can be considered definitional
Tesselation
- in general, tessellation is the process of dividing an arbitrary polygon into a disjoint union of smaller polys
- most common case in practice is to tessellate into triangles because
- triangles are the simplest non-degenerate polygon
- triangles are always convex
- tessellation into triangles is specifically called triangulation
- fact: any simple polygon with sides can always be tessellated into exactly
 triangles
triangles - this is minimal, though it is also possible to use more triangles
- easy to see for convex simply polys
- pick any arbitrary vertex
- draw diagonals from to all other vertices
- done!
- number of diagonals will always be

- there will be one triangle per diagonal, plus “the last one”
- the resulting array of triangles can be efficiently stored as a triangle fan, which we will discuss in more detail next time
- in fact, even non-convex simple polys can be tessellated into triangles, but a more involved algorithm is required
- extensions also exist for non-simple polys, but we will not cover them
- what is the computational complexity of triangluating a simple polygon?
- note that a lower bound is
 , because at least triangles must be produced
, because at least triangles must be produced - in 1991, Chazelle demonstrated an algorithm, but it’s complex and not typically implemented
- reasonably simple
 algorithms exist, and are used in practice
algorithms exist, and are used in practice - a randomized alg that is probabilistically
 is also often used
is also often used
- we will study a particularly simple algorithm called ear clipping that is

- hence, not optimal, but can still be reasonably fast in practice for polys with relatively few vertices
- We have already defined “convexity” in terms of a whole polygon. We can also say that an individual vertex is convex if the internal angle at that vertex is less than
 radians; otherwise it’s convcave or reflex.
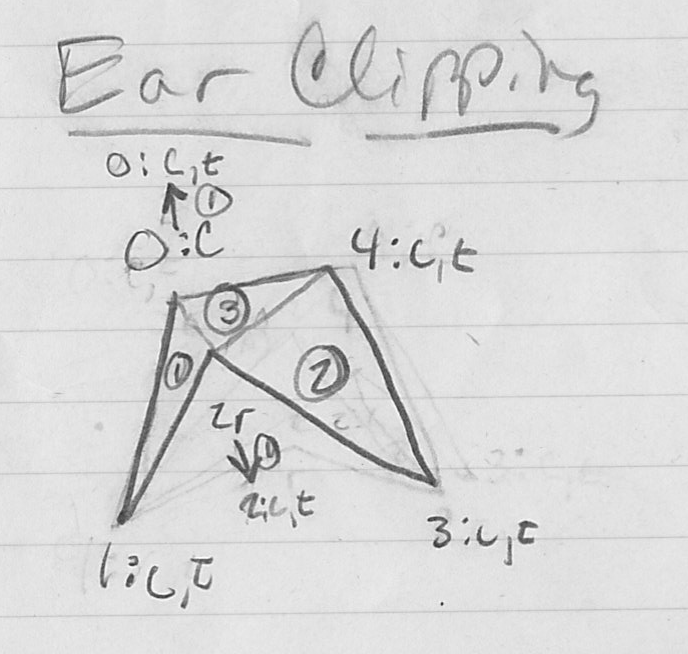
radians; otherwise it’s convcave or reflex. - an ear is a sequence of three consecutive vertices
 ,
,  ,
,  where
where- is convex and
- the triangle formed by the three vertices includes no other vertex
- terminology: the segment from to is a diagonal of the polygon, and the vertex is the ear tip
- fact: a poly with
 always has at least two ears
always has at least two ears - basic idea:
- while

- find an ear and cut it off!
- naive implementation is

- : until remaining polygon is a triangle
- : check each sequence of three consecutive vertices
- : check if every other vertex is outside the candidate ear
- note that the resulting triangulation will have exactly triangles, because each time an ear is cut off one triangle is produced and one vertex is consumed
- a faster implementation is also relatively simple
- : label all original vertices as either convex or reflex
- : find all ear tips of the original poly by checking for each convex vertex whether any reflex vertex is inside the corresponding candidate ear
- : repeat until

 using e.g. linked list datastructures: cut off the first currently known ear , ,
using e.g. linked list datastructures: cut off the first currently known ear , , - “repair” the datastructures for the adjacent vertices and
- if vertex was convex, then it is still convex
- if vertex was reflex, it may become convex
- : each adjacent vertex that ends up convex needs to be (re-)tested for “ear-tip-ness”, again by checking if any reflex vertex is inside the ear
- example
- writing a fast, small, portable, and general triangulation library is apparently a tall order
- almost like writing a good image compression/decompression library
- in practice, a number of algorithms exist, with licenses ranging from public domain to proprietary
- see e.g. here for an account many commonly available libraries and their advantages and disadvantages
Next Time
- reading on website
- triangle meshes
- barycentric coordinates
- rasterizing triangles
 and
and  and
and and
and 

 to
to 
