Computer Graphics (CS 4300) 2010S: Lecture 2
Today
- HW1 due next class meeting!
- coordinate frames
- segments, rays, and intersections 2D
Coordinate Frames
- components of an
 -dimensional vector
-dimensional vector  define a point
define a point  in an -dimensional coordinate frame as a linear combination of the -dimensional basis vectors
in an -dimensional coordinate frame as a linear combination of the -dimensional basis vectors  defining the frame
defining the frame - linear combination is computed as

- same as product of a matrix and a vector:

- (general
 multiplication and its uses in graphics will be covered later in the course)
multiplication and its uses in graphics will be covered later in the course) - technically, any set of -dimensional vectors can form a basis for an -dimensional frame as long as they are linearly independent
- orthonormal bases are of particular interest: all
 and for all
and for all 

- an orthonormal basis defines a Cartesian frame
- “standard” basis is

 , so
, so 
- note this is right-handed; if we had defined
 instead, it would have been left handed
instead, it would have been left handed - there are always exactly two options for the “handedness” (chirality) of a 3D orthonormal basis
- right-handed coordinate frames are typical in graphics, but not totally universal
- it is often useful to define other local coordinate frames with arbitrary pose relative to the standard global frame
- pose of an object is its position plus its orientation
- we will cover this more formally later, but basically, the pose of a local frame is defined by the location of its origin
 and an orthonormal basis
and an orthonormal basis 
- all of these are vectors in the global frame
- the matrix
 defines the orientation of the local frame
defines the orientation of the local frame - to transform a vector
 from the local to the global frame, compute
from the local to the global frame, compute 
- note this does not change the magnitude of the vector, only its direction
- this is because the columns of
 are orthonormal
are orthonormal
- since a vector is technically only a magnitude and a direction, with no specific “place in space”, no need for in this operation
- to transform a point or location
 from the local to the global frame, compute
from the local to the global frame, compute 
- going the other way: to transform a vector
 from the global to the local frame, compute
from the global to the local frame, compute 
- this uses the fact that the inverse of an orthogonal matrix is its transpose (show easy derivation from above eqn for )
- note this is the same as computing
 , as in the text
, as in the text
- transforming a point or location
 from the global to the local frame: solve above eqn for
from the global to the local frame: solve above eqn for 
- note this is not the same as

- there are algorithms to “square” up a set of vectors to ensure they are orthonormal
- also sometimes required to construct a basis given only two or one vector
- if given two non-parallel vectors, use cross product to produce third, and square up if necessary
- if given only one vector, first find some other non-parallel vector, then proceed as above
Rays and Segments
- points have already been discussed: an -dimensional vector can be used to represent a point in dimensions by giving a displacement relative to the origin in some coordinate frame
- a ray is a continuum of points starting at some location and continuing in a straight line to infinity
- can be represented as a start point
 plus a unit vector
plus a unit vector  giving the direction of the ray
giving the direction of the ray - def works in any dimension
- a line segment, or just a segment, is the continuum of points along a straight line between two given locations
- usually represented as the two endpoints, typically identified as start and end

- can also represent as start and a displacement
 from there to end
from there to end- easy to convert:

- either def works in any dimension
- can define the “left” and “right” sides in 2D: stand at and face along
- on what side of the segment does a given point
 fall?
fall?- compute
 component of
component of  , extending each to 3D with
, extending each to 3D with  :
: 
- (note that
 and
and  components of cross product of any two vectors each with will be 0 anyway)
components of cross product of any two vectors each with will be 0 anyway) - if positive, is on left of segment
- if zero, is coincident with line through segment
- if negative, is on right of segment
- this can be used e.g. to pick triangles in the plane
- unit normal
 can also be used to answer this question (we will see this when studying line equations and the signed distance from a point to a line)
can also be used to answer this question (we will see this when studying line equations and the signed distance from a point to a line) - can parametrize points along the segment as
 where
where 
- intersection of two 2D segments:

- two linear equations in two unknowns


- rearranging into standard form,



- can solve for
 and
and  (carefully):
(carefully):- e.g. use Cramer’s rule, watch out for “no solution”
- same result can be derived using law of sines and cross product
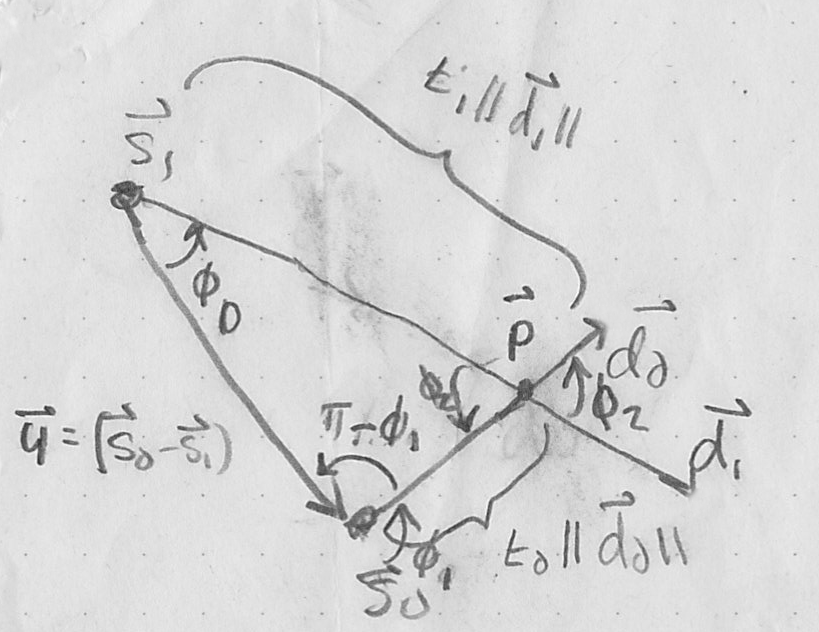
- let

- law of sines:
- treat
 ,
,  , and
, and  as 3D vectors with
as 3D vectors with - thus, the magnitude any cross product will be just the z component
- let

- let

- let




- similarly,



- if
 segments are collinear
segments are collinear - segments intersect iff

- same math works for segment/ray and ray/ray intersection, except the condition for the ray(s) is that

Next Time
- HW1 due!
- lines in 2D
- “triangle asteroids” example
- output devices
- reading on website